Portfolio of Aditya Karumbaiah
Projects

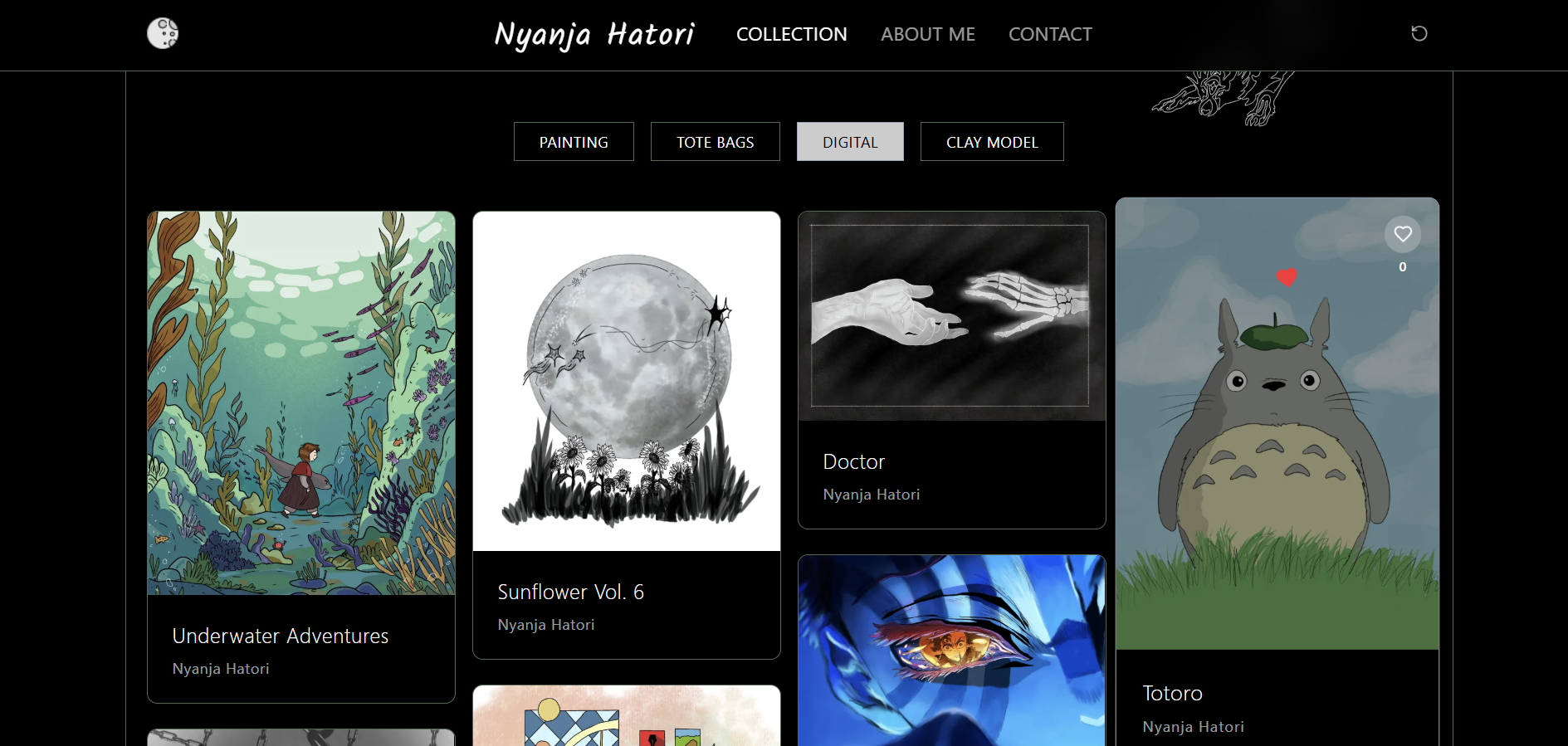
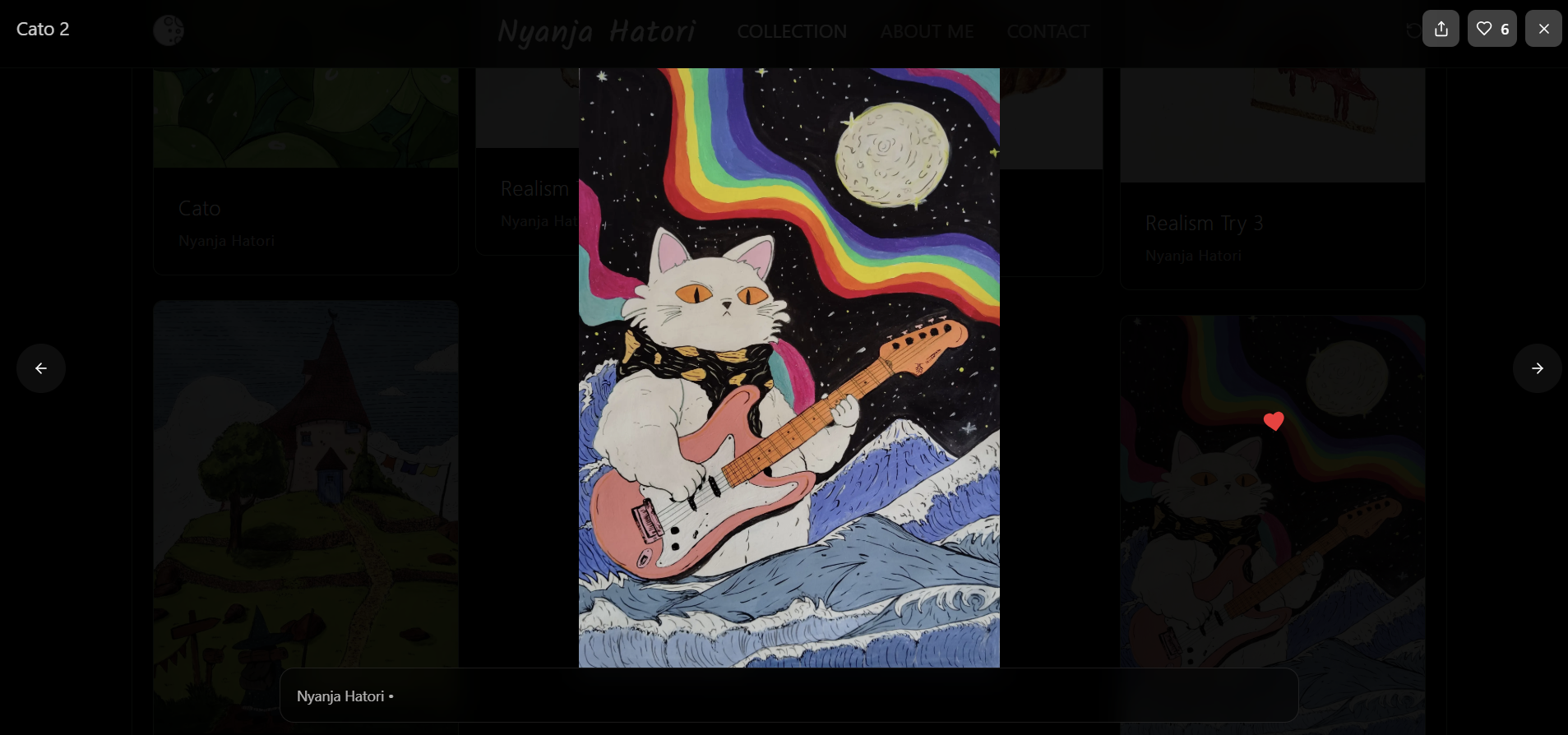
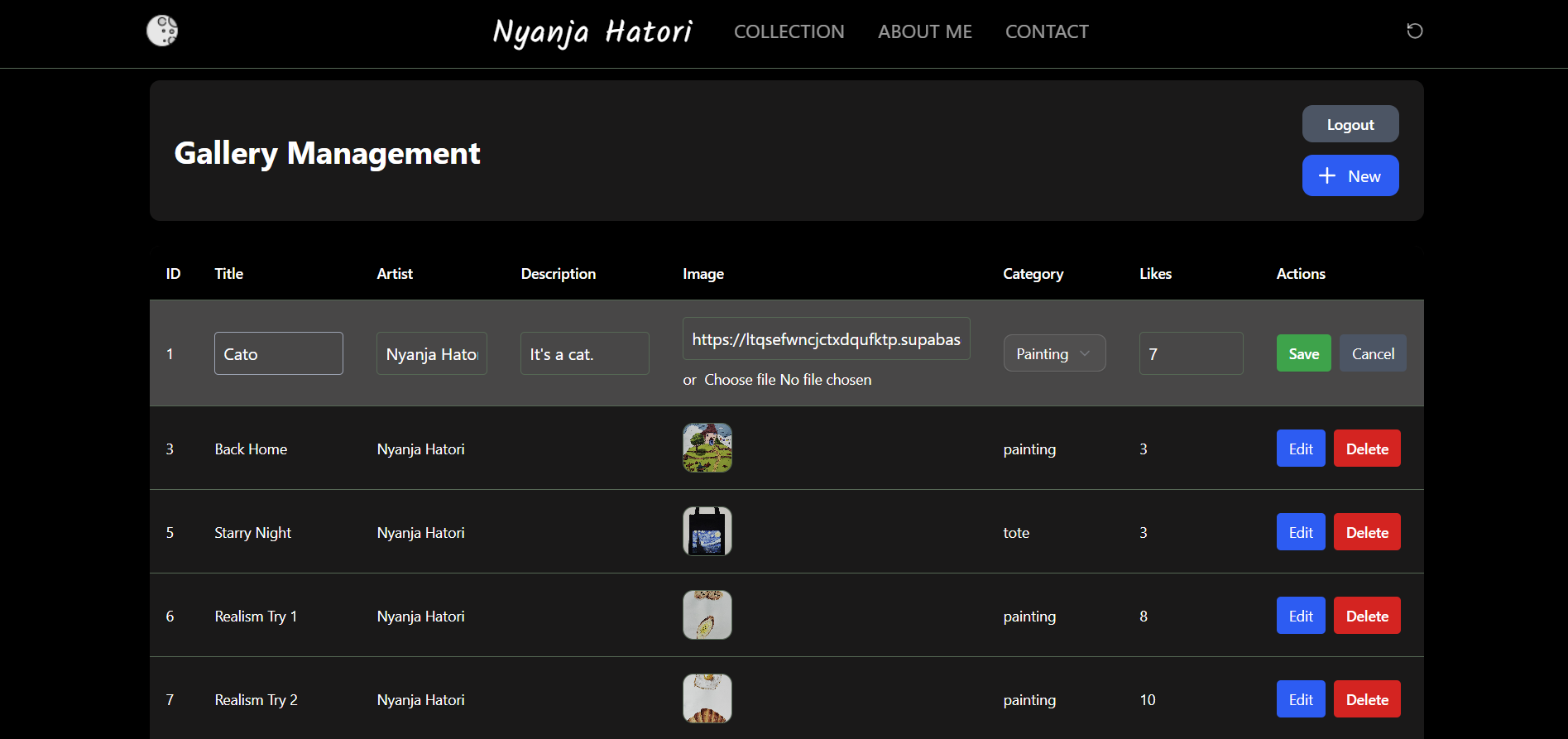
A Web Gallery
An elegant, responsive web gallery for showcasing images with smooth transitions and interactive hover effects. Features category based filtering and optimized layouts to deliver a cool and artistic browsing experience across devices.
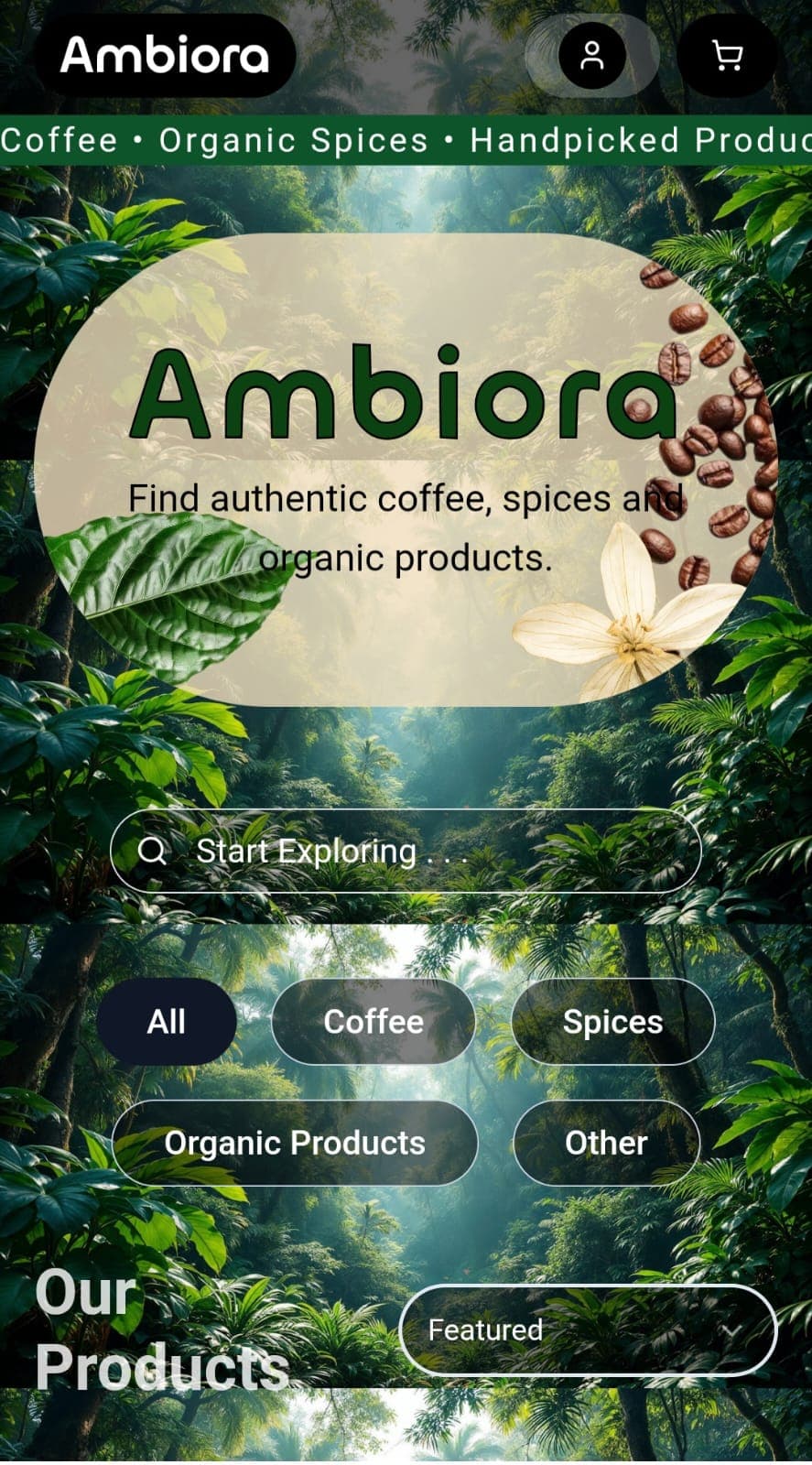
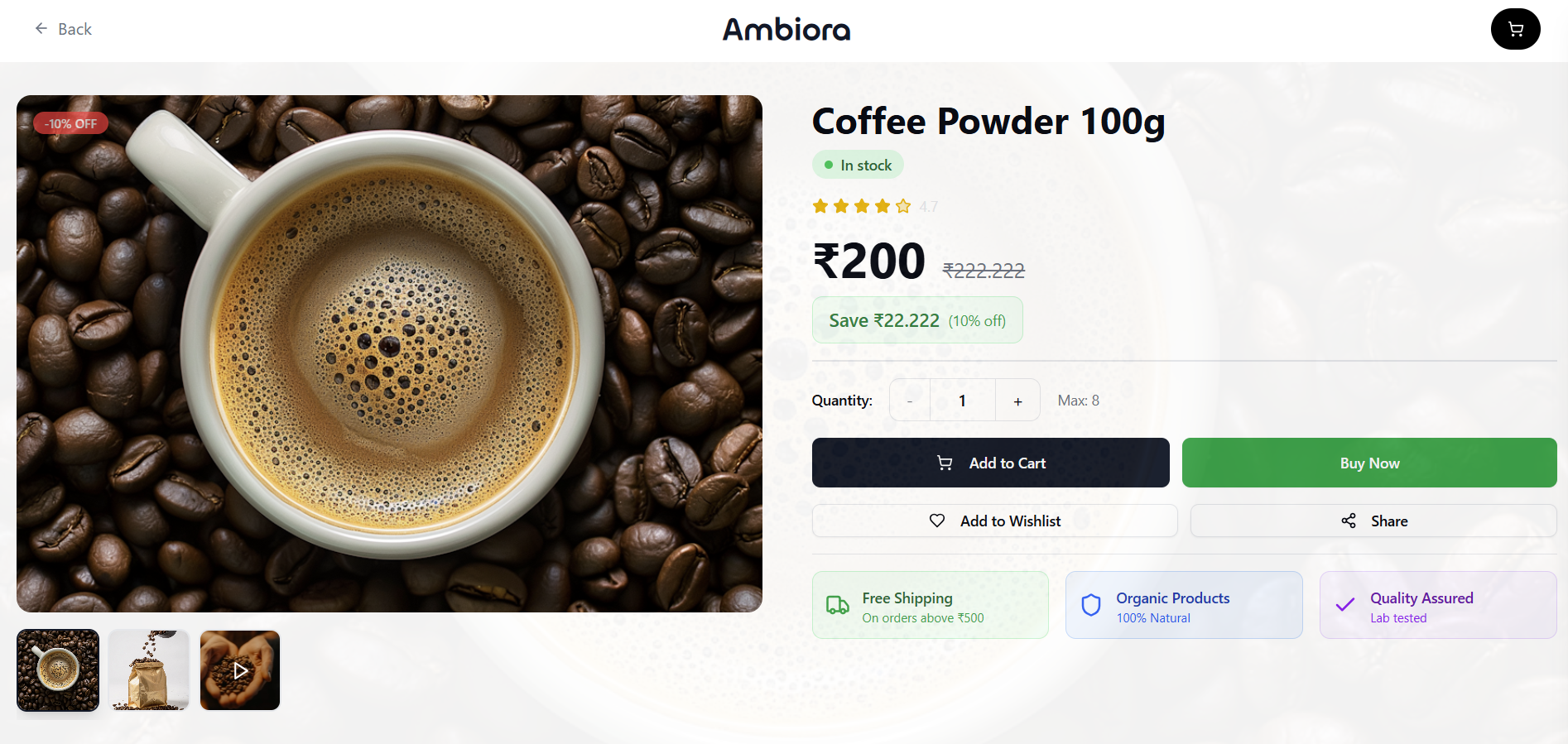
Ambiora
A full-featured e-commerce platform built with Next.js and Supabase. Supports product browsing, cart management, secure authentication, and checkout flow. Includes an admin dashboard for inventory and business management and is actively under development.
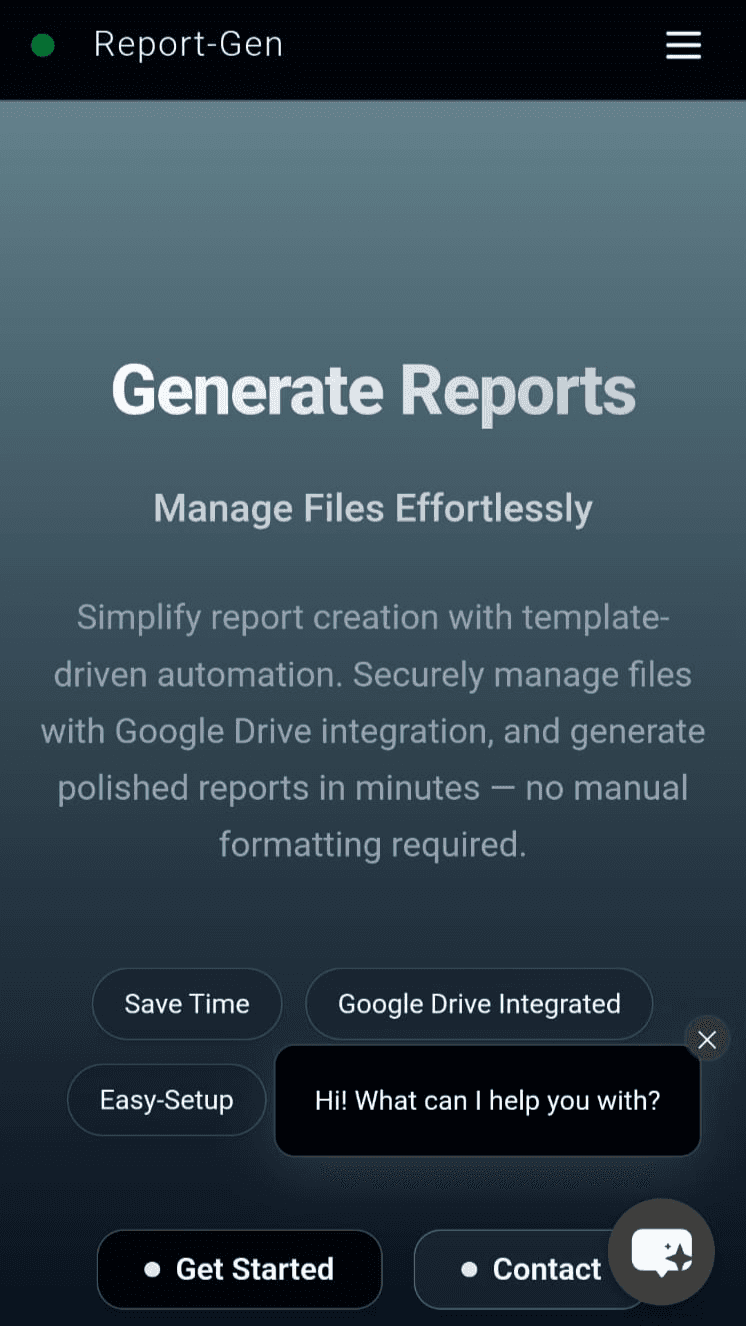
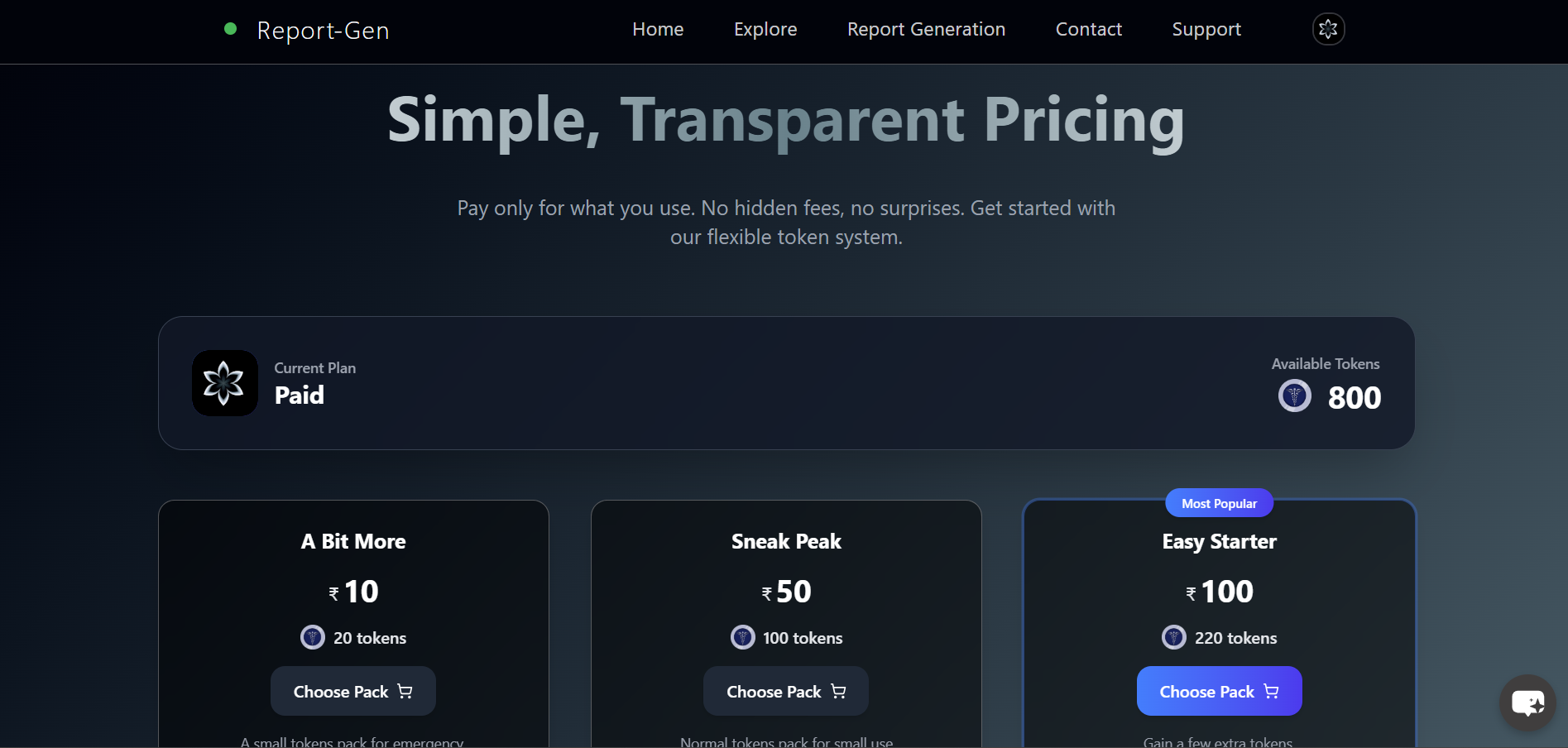
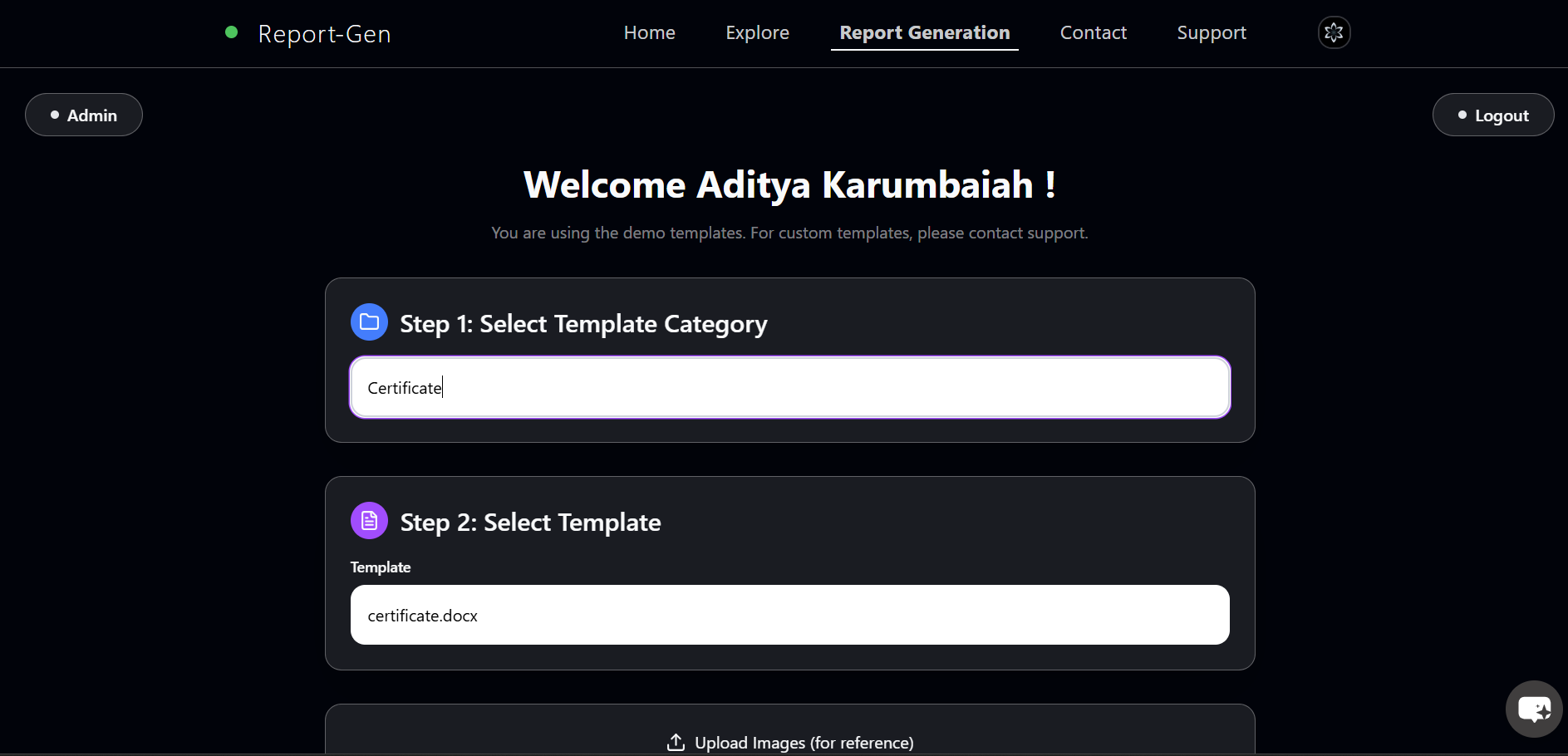
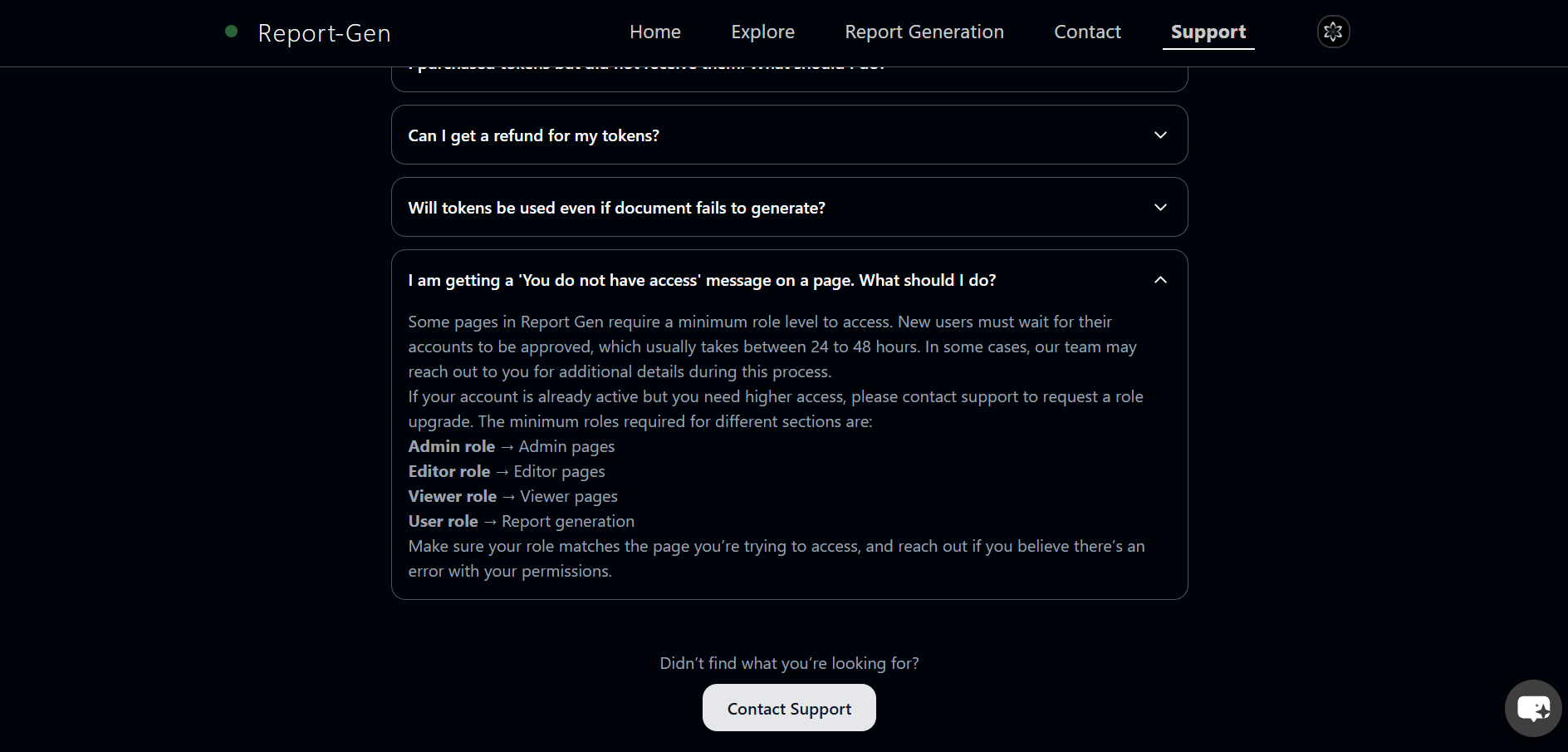
Report-Gen
Report-Gen is a web platform that automates report creation and management by integrating directly with Google Drive. It supports placeholder replacement, structured document generation, and seamless downloads—eliminating manual formatting and significantly reducing report preparation time.

MARC
MARC (My Automated Robotic Companion) is a ROS2 powered robotic system focused on intelligent motion planning, object manipulation, and interactive behaviors. Utilizes MoveIt for advanced path planning, a modular system that can be easily integrated with existing robotic arms.
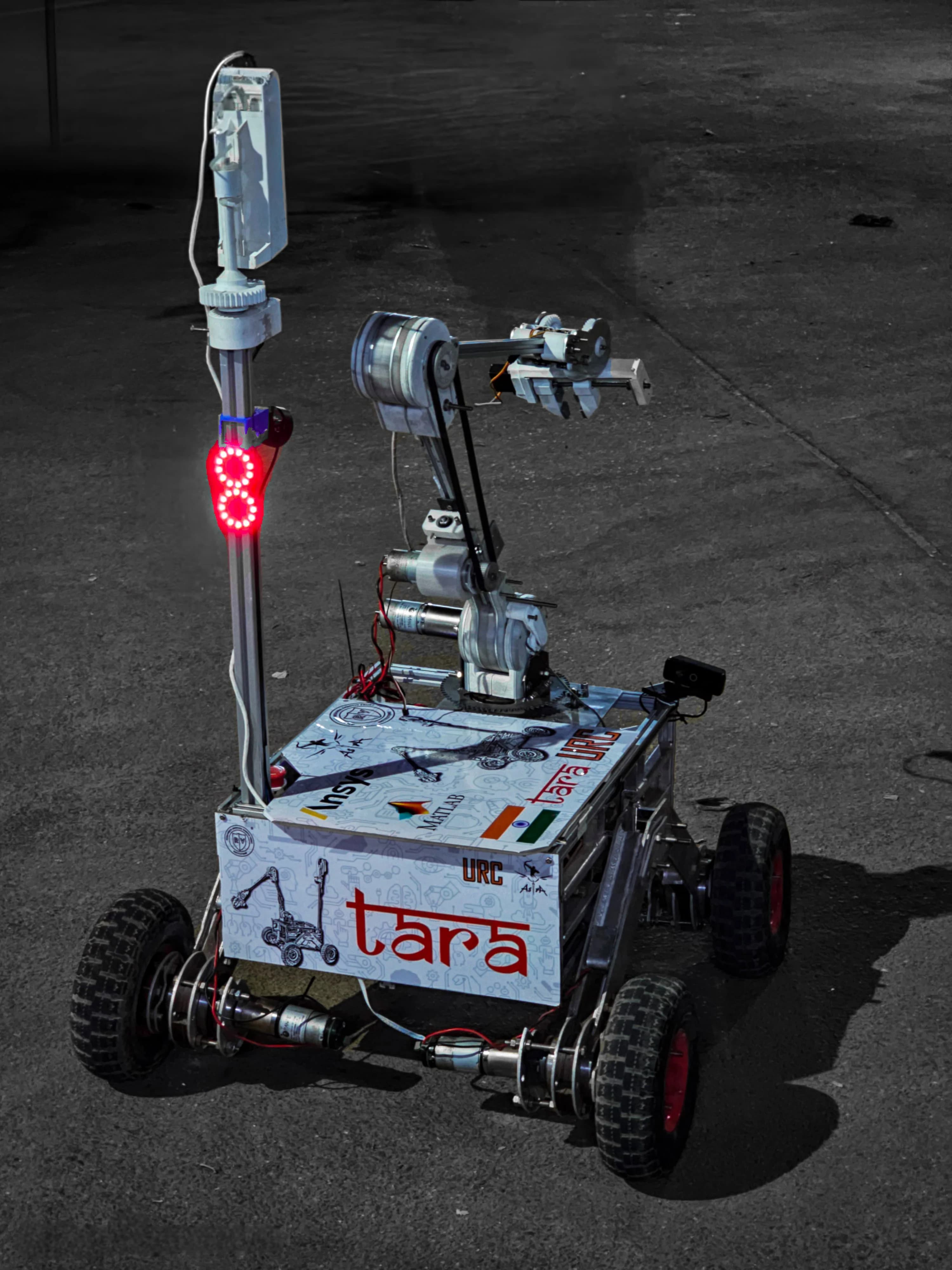
Tara
Tara is an autonomous rover developed by Team Astra using ROS 2. It features autonomous navigation, inverse-kinematics based mobility, and embedded control systems, enabling it to perform diverse real-world missions.
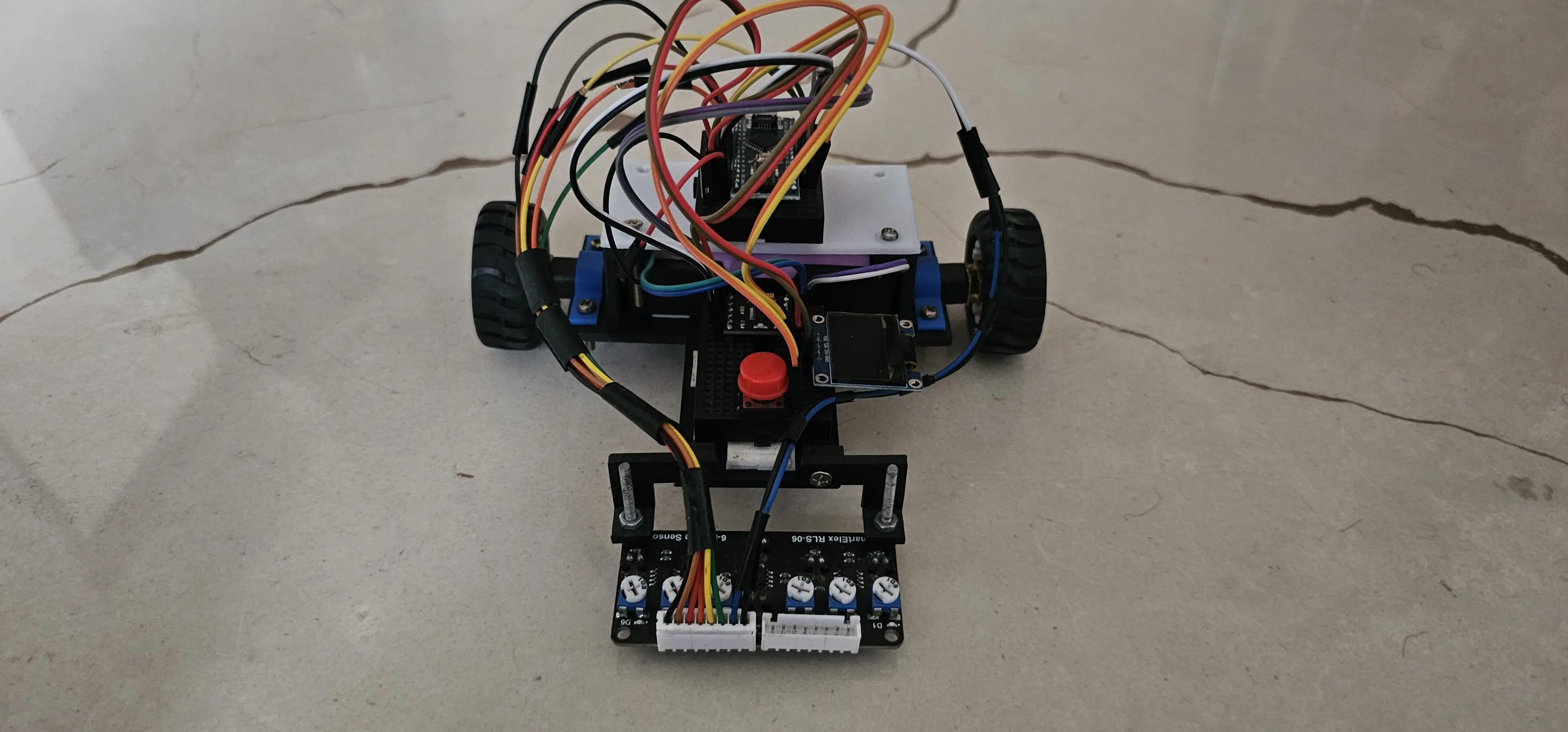
PID-Based Line Follower
A precision line-following robot implementing PID control algorithms in C++ on Arduino. Designed for adaptive path tracking and stability, with CAD-modeled mechanics for improved balance and performance.
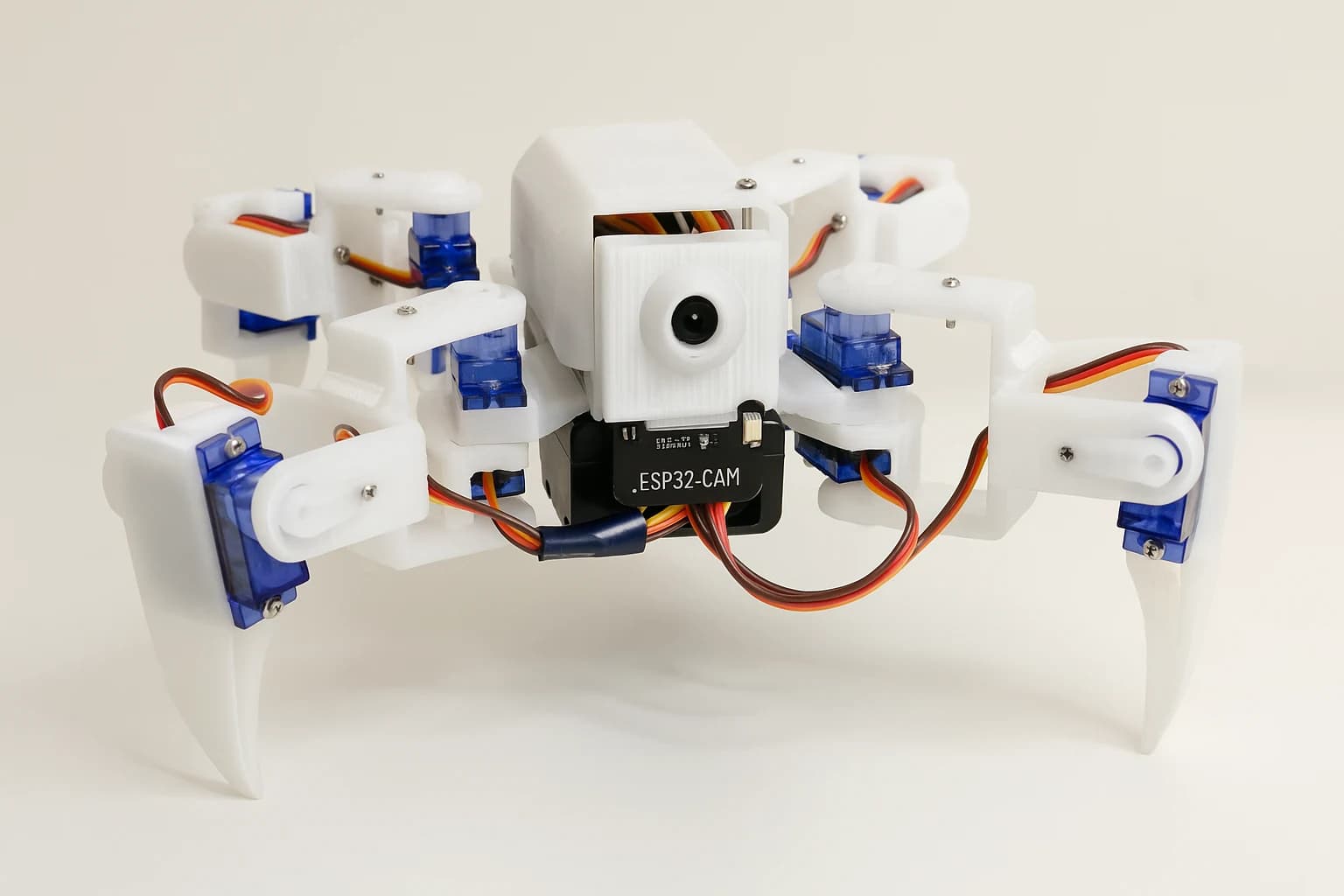
Spidey
Spidey is a quadruped robot inspired by spider-like locomotion. Built using Arduino and ESP32, it features multi-jointed legs, basic obstacle awareness, and expressive movements, combining robotics with playful interaction.


Meet Spidey !
Websites